Ученые спроектировали робота, который, как они утверждают, однажды сможет прыгнуть на 400 футов (120 метров) — достаточно высоко, чтобы перепрыгнуть Статую Свободы одним прыжком. Он даже мог бы прыгнуть на высоту 650 футов (200 метров) на Луне.
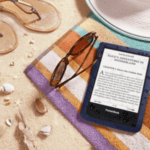
Робот-прыгун в высоту предназначен для исследования труднопроходимой местности, которую обычным роботам сложно преодолеть, например пещерных систем, лесов и, возможно, других планет. Он оснащен уникальными ножками призматической формы с растягивающимися пружинами, предназначенными для максимального преобразования упругой энергии в кинетическую во время прыжка.
Исследователи заявили, что их конструкция может позволить роботам прыгать на высоту, во много раз превышающую их собственный размер, и более чем в шесть раз выше. чем текущий рекорд. Они опубликовали свои выводы 24 мая в журнале Теория механизмов и машин.
Чтобы продемонстрировать свою теорию конструкции, ученые построили робота высотой 15,7 дюймов (40 см), который мог прыгать в воздух на высоту более 5 футов (1,6 м).
«Хотя прыгающие роботы уже существуют, существует несколько серьезных проблем при разработке этих прыжковых машин, главная из которых — прыгать достаточно высоко, чтобы преодолевать большие и сложные препятствия», — соавтор исследования. Джон ЛоОб этом заявил научный сотрудник в области космической робототехники в Манчестерском университете. заявление. Наша разработка значительно повысит энергоэффективность и производительность прыгающих роботов с пружинным приводом».
Связанный: Посмотрите, как «собака-робот» преодолевает базовый курс паркура с помощью искусственного интеллекта.
Обычные роботы обычно оснащены колесами или, в случае таких машин, как Атлас Boston Dynamics и Местодве или четыре ноги. Хотя эти конструкции хорошо работают на простой местности, они не подходят для преодоления препятствий, таких как скалы или крутые и неровные поверхности. Вот где пригодится конструкция для прыжков.
Гигантский скачок для робототехники
Прыгающие роботы обычно используют двигатели для хранения энергии в пружине, а затем высвобождают эту энергию для движения робота вверх. Усиление мощности — механизм, наблюдаемый у животных, таких как блохи и саранча, посредством которого накопленная упругая энергия преобразуется в кинетическую энергию — позволяет пружинам генерировать большую выходную мощность, чем автономные двигатели, что приводит к более высоким прыжкам.
Предыдущий конструкции прыгающих роботов Они встроили усиление мощности, но они склонны взлетать до того, как их энергия пружины полностью высвободится, говорят ученые, а это означает, что их накопленная упругая энергия не полностью преобразуется в кинетическую энергию. Эти роботы также имеют тенденцию тратить энергию, двигаясь из стороны в сторону или вращаясь, вместо того, чтобы прыгать прямо вверх.
«Нужно было ответить на множество вопросов и принять множество решений относительно формы робота, например, должны ли у него быть ноги, чтобы отталкиваться от земли, как у кенгуру, или он должен быть больше похож на сконструированный поршень с гигантской пружиной?» — соавтор Бен Парсльюстарший преподаватель кафедры аэрокосмической техники в Манчестерском университете, говорится в заявлении.
Чтобы выяснить, какой тип конструкции будет наилучшим, ученые изучили две модели роботов: одну с прямолинейной «призматической» системой и одну с вращательной системой.
В призматической модели ноги робота двигались поршневыми движениями, похожими на пого-палку. Однако дополнительный вес в нижней части робота создавал инерционный эффект, то есть пружина не могла полностью растянуться до того, как робот оторвется от земли.
Вращательная модель, тем временем, имела ноги, которые двигались по кругу, подобно кенгуру. В этой модели вращательное движение ног заставляло робота отрываться от земли до того, как пружины полностью высвобождали накопленную энергию — опять же, снижая высоту и эффективность прыжка.
Чтобы решить эти проблемы, команда объединила лучшее из обеих конструкций. Переместив большую часть веса робота наверх и сделав нижнюю часть более легкой и обтекаемой, они смогли улучшить его устойчивость и энергоэффективность. Аналогичным образом, используя прямолинейные призматические ноги с пружинами, которые выдвигаются линейно, ученые смогли смягчить проблему задержек или преждевременных взлетов.
По словам ученых, сейчас ведутся работы по контролю направления прыжков и использованию кинетической энергии, генерируемой при приземлении робота, что может быть использовано для увеличения количества прыжков, которые он может совершить на одном заряде. Команда также будет изучать более компактные конструкции, подходящие для космических миссий.