Робот ClearPath Jackal перемещается по окружающей среде в Калифорнийском университете в Сан-Диего. Кредит: Лонг и др.
Чтобы успешно выполнять миссии в динамичных и неструктурированных условиях реального мира, мобильные роботы должны иметь возможность адаптировать свои действия в режиме реального времени, чтобы избежать столкновений с близлежащими объектами, людьми или животными.
Большинство существующих подходов к предотвращению столкновений роботов основаны на создании точных карт среды, в которой перемещается робот, а затем планировании наилучших траекторий для безопасного достижения желаемого места.
Многие ранее предложенные методы навигации роботов дали многообещающие результаты при моделировании. Однако они часто не так хорошо работают в реальных условиях, особенно в тех, которые непредсказуемы и быстро меняются с течением времени.
Исследователи из Калифорнийского университета в Сан-Диего недавно представили новый метод, который может улучшить навигацию мобильных роботов в динамичных и неструктурированных средах.
Этот метод, представленный в статье, опубликованной на arXiv сервер препринтов, до сих пор успешно применялся к роботу Jackal, колесной роботизированной системе, разработанной ClearPath Robotics.
«В нашей недавней статье рассматривается острая необходимость безопасной автономной навигации мобильных роботов в сложных, неизвестных и динамичных средах, учитывая при этом ограниченные сенсорные и вычислительные ресурсы, доступные на борту», — рассказал Tech Xplore Кехан Лонг, соавтор статьи.
«Хотя предыдущие исследования позволили добиться значительных успехов с использованием таких методов, как искусственные потенциальные поля, функции навигации и функции контроля барьеров, многие из этих методов основаны на построении точной карты окружающей среды».
Создание карт динамической среды в режиме реального времени может оказаться сложной задачей, особенно если эта среда быстро меняется с течением времени. Ключевой целью недавнего исследования Лонга и его коллег была разработка нового метода, который мог бы гарантировать безопасность мобильных роботов в этих меняющихся условиях, напрямую используя данные, собранные бортовыми датчиками робота, вместо восстановления точных карт окружающей среды.
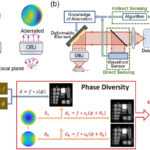
«Наш новый метод безопасной навигации мобильных роботов представляет собой формулировку устойчивой к распределению барьерной функции управления (DR-CBF)», — пояснил Лонг.
«Основная концепция заключается в том, чтобы напрямую включать измерения датчиков дальности робота с шумом (например, от LiDAR) в оптимизацию управления в качестве ограничений безопасности, а не сначала строить точную карту. Используя строгие теории из устойчивой к распределению оптимизации, мы можем надежно учитывать неопределенности как в зондировании, так и в динамической среде».
Метод навигации мобильных роботов, разработанный Лонгом и его коллегами, имеет различные преимущества перед другими подходами, представленными за последние несколько лет. В частности, он может гарантировать безопасную работу роботов, предотвращая их столкновения с объектами, требуя при этом лишь ограниченных вычислительных ресурсов.
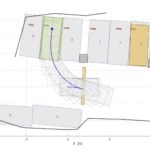
«Отличительной особенностью нашего метода является то, что он обеспечивает безопасную навигацию за счет непосредственного использования последних данных датчиков при определении управляющих входных сигналов, что позволяет роботу быстро адаптироваться к изменениям окружающей среды», — сказал Лонг.
«Практические последствия нашей работы значительны. Обеспечивая разработку надежных мобильных роботов с меньшими вычислительными требованиями, наш подход потенциально может снизить стоимость создания роботов, делая их более доступными для широкого спектра применений».
Чтобы проверить свой метод, Лонг и его коллеги применили его к ClearPath Jackal, колесному защищенному от атмосферных воздействий роботу, оснащенному датчиком LiDAR. Их результаты были обнадеживающими, демонстрируя эффективность и универсальность их подхода как в динамических условиях как внутри, так и снаружи помещений.
«В наших будущих исследованиях мы планируем распространить нашу методологию на более сложные роботизированные системы, такие как роботы с ногами и гуманоиды», — добавил Лонг. «Наша конечная цель — разработать безопасных и способных роботов, которые смогут перемещаться и взаимодействовать в любой среде, обеспечивая при этом надежные гарантии безопасности».
Больше информации:
Кехан Лонг и др., Распределительно-робастное управление на основе датчиков для безопасной навигации робота в динамических средах, arXiv (2024). DOI: 10.48550/arxiv.2405.18251
Existentialrobotics.org/DR_Saf … _Navigation_Webpage/
arXiv
© 2024 Сеть Science X
Цитирование: метод, обеспечивающий безопасную навигацию мобильного робота в динамических средах (2024 г., 21 июня), получено 23 июня 2024 г. с https://techxplore.com/news/2024-06-method-enable-safe-mobile-robot.html.
Этот документ защищен авторским правом. За исключением любых добросовестных сделок в целях частного изучения или исследования, никакая часть не может быть воспроизведена без письменного разрешения. Содержимое предоставлено исключительно в информационных целях.