Левитирующий поезд-робот на Луне звучит надуманно? НАСА, похоже, так не считает, поскольку агентство только что дало зеленый свет дальнейшему финансированию исследования этой концепции.
Проект под названием «Гибкая левитация на треке» (FLOAT) был перенесен во вторую фазу программы НАСА «Инновационные передовые концепции» (NIAC), целью которой является разработка «научно-фантастических» проектов для будущего освоения космоса.
По данным агентства, проект FLOAT может привести к транспортировке материалов по поверхности Луны уже в 2030-х годах.
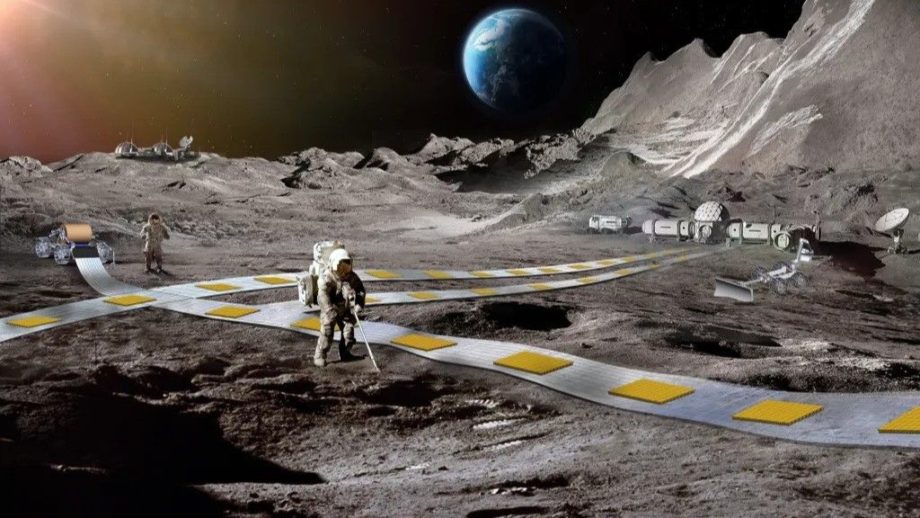
«Мы хотим построить первую лунную железнодорожную систему, которая обеспечит надежную, автономную и эффективную транспортировку полезной нагрузки на Луну», — написал в блоге НАСА руководитель проекта Итан Шалер, инженер-робототехника Лаборатории реактивного движения НАСА. «Надежная и долговечная роботизированная транспортная система будет иметь решающее значение для повседневной работы устойчивой лунной базы в 2030-х годах».
Связанный: Стаи роботов в форме собак однажды смогут бродить по Луне — если они сначала смогут найти свое место на Земле
Согласно первоначальному проекту НАСА, FLOAT будет состоять из магнитных роботов, парящих над дорожкой из трехслойной пленки, чтобы уменьшить истирание пылью на лунной поверхности. На этих роботах будут установлены тележки, которые будут двигаться со скоростью примерно 1 миля в час (1,61 км/ч). Они смогут транспортировать примерно 100 тонн (90 метрических тонн) материала в день на будущую лунную базу НАСА и обратно.
НАСА планирует отправить астронавтов обратно на Луну уже в 2026 году в рамках миссии агентства «Артемида» и стремится в конечном итоге создать постоянную лунную базу для помощи в будущих исследованиях космоса.
Другие «научно-фантастические» планы NIAC, перешедшие на следующий этап разработки, включают телескопы на жидкостной основе и ракету, приводимую в движение плазмой.




