Адам Хунг и профессор Талия Мур запускают робота SKOOTR на открытом воздухе. Авторы и права: Хунг, Аду и Мур.
Исследователи из Мичиганского университета недавно разработали SKOOTR, трехпедального робота-конькобежца, который может эффективно передвигаться по окружающей среде, не переворачиваясь неоднократно. Этот робот представлен в статье, размещенной на сервере препринтов. arXivоказался более устойчивым, чем другие трехногие роботы, которые часто демонстрируют плохую устойчивость из-за отсутствия четвертой ноги, которая могла бы лучше балансировать их тело.
«Основное внимание моей лаборатории уделяется разработке роботизированных платформ с открытым исходным кодом, которые часто вдохновляются биологией», — рассказала Tech Xplore Талия Ю. Мур, соавтор статьи. «Эта идея пришла мне в голову, когда я катался на своем офисном стуле между группами студентов. Я понял, что пассивно вращающийся офисный стул может легко вращаться в любом направлении, и я могу использовать ноги для выполнения различных маневров, оставаясь при этом неподвижным. удивительно устойчив. Я понял, что эта всенаправленная маневренность подобна тому, как хрупкие звезды меняют направление во время плавания».
Ключевой идеей, лежащей в основе этого недавнего исследования, было объединение маневренности шарового робота со стабильностью и универсальностью ножного робота. Использование радиально-симметричной конфигурации, такой как морская звезда или паутина, позволило бы роботу легко менять направление, но потребовало бы открытия новых форм передвижения, возникающих в результате одновременного толкания и перекатывания. Мур поделилась этой идеей со своими студентами, и один из них, Адам Хунг, решил изучить ее дальше.
«Адам Хунг поехал домой на лето и построил дома робота с помощью своего 3D-принтера», — сказал Мур. «Один из моих аспирантов, Челлен Эннинфул Аду, также помогал с динамикой и управлением. Тем летом мы встречались каждую неделю при масштабировании, и к началу осеннего семестра у нас был полностью функциональный робот».
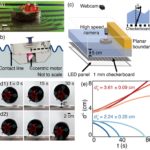
SKOOTR, робот, разработанный Мур и ее коллегами, состоит из большой сферы, расположенной посередине трех роботизированных ног. На вершине пассивно вращающейся сферы находится центральный узел, в котором находится вся электроника, поддерживающая функционирование робота, из которого вырастают три ноги. Каждая из ног имеет два сустава, управляющих их сгибанием и разгибанием, а также гибридный режим контакта на ее кончике.
«Мы используем сервопривод для переключения между пассивным роликом и цепкой резиновой ногой», — объяснил Мур. «Резиновая ножка обеспечивает трение, поэтому он может использовать ногу для отталкивания от земли, в то время как катящийся ролик позволяет другим ногам сохранять свое положение во время движения. Центральная сфера может легко выдвигаться и заменяться для различных целей».
Робот SKOOTR можно настраивать, поскольку большую сферу в центре тела можно легко заменить в соответствии с конкретными потребностями пользователей. Например, полая сфера может служить контейнером, в котором можно хранить объекты, чтобы робот мог доставлять их в нужные места. Кроме того, более тяжелые или легкие сферы могут частично влиять на эффективность, скорость передвижения и устойчивость робота.
«Благодаря такому сочетанию центральной сферы и нескольких ножек SKOOTR невероятно стабилен», — сказал Мур. «Мы провели множество экспериментов со SKOOTR, и его практически невозможно перевернуть во время работы. Он также способен на гораздо большее, чем можно было бы подумать, просто глядя на «бегущую» походку. Поднимая сферу вверх с помощью Благодаря своим ногам SKOOTR может преодолевать препятствия, которые были бы трудны для других катящихся роботов. SKOOTR может даже подниматься по лестнице».
В лабораторных экспериментах, проведенных Мур и ее учениками, робот SKOOTR показал себя на удивление хорошо, продемонстрировав большую устойчивость, чем другие трехногие роботы более традиционной конструкции. В будущем робота можно будет представить и протестировать в реальных условиях, чтобы изучить его способность решать различные задачи.
«Теперь мы планируем узнать больше о преимуществах радиальной симметрии роботов, открыть новые формы передвижения и создать роботов с открытым исходным кодом, которые могут быть легко использованы другими исследователями», — добавил Мур. «У нас уже есть сотрудник-невролог, который заинтересован в использовании SKOOTR для лучшего понимания осьминогов».
Больше информации:
Адам Джошуа Хунг и др., SKOOTR: катающийся на коньках, всеориентированный трехногий робот, arXiv (2024). DOI: 10.48550/arxiv.2402.04374
arXiv
© 2024 Сеть Science X
Цитирование: Конькобежный трехпедальный робот, способный к очень стабильному передвижению (2024 г., 16 марта), получено 18 марта 2024 г. с https://techxplore.com/news/2024-03-skating-tri-robot-capable-highly.html.
Этот документ защищен авторским правом. За исключением любых добросовестных сделок в целях частного изучения или исследования, никакая часть не может быть воспроизведена без письменного разрешения. Содержимое предоставлено исключительно в информационных целях.